 Designing a humanoid joint usually starts as a clean mechanical problem and turns into a power electronics problem sooner than expected. The motor needs to sit close to the joint to keep inertia in check, but the drive stage and sensors want their own space, and the wiring between them quietly shapes current loops and dynamic behavior. At some point the joint cavity fills up and every extra millimeter of PCB feels expensive. The EPC91122 evaluation board is built right into that corner, not as a standalone lab board but as a reference for what happens when a complete three phase inverter moves directly into the joint itself.
Designing a humanoid joint usually starts as a clean mechanical problem and turns into a power electronics problem sooner than expected. The motor needs to sit close to the joint to keep inertia in check, but the drive stage and sensors want their own space, and the wiring between them quietly shapes current loops and dynamic behavior. At some point the joint cavity fills up and every extra millimeter of PCB feels expensive. The EPC91122 evaluation board is built right into that corner, not as a standalone lab board but as a reference for what happens when a complete three phase inverter moves directly into the joint itself.
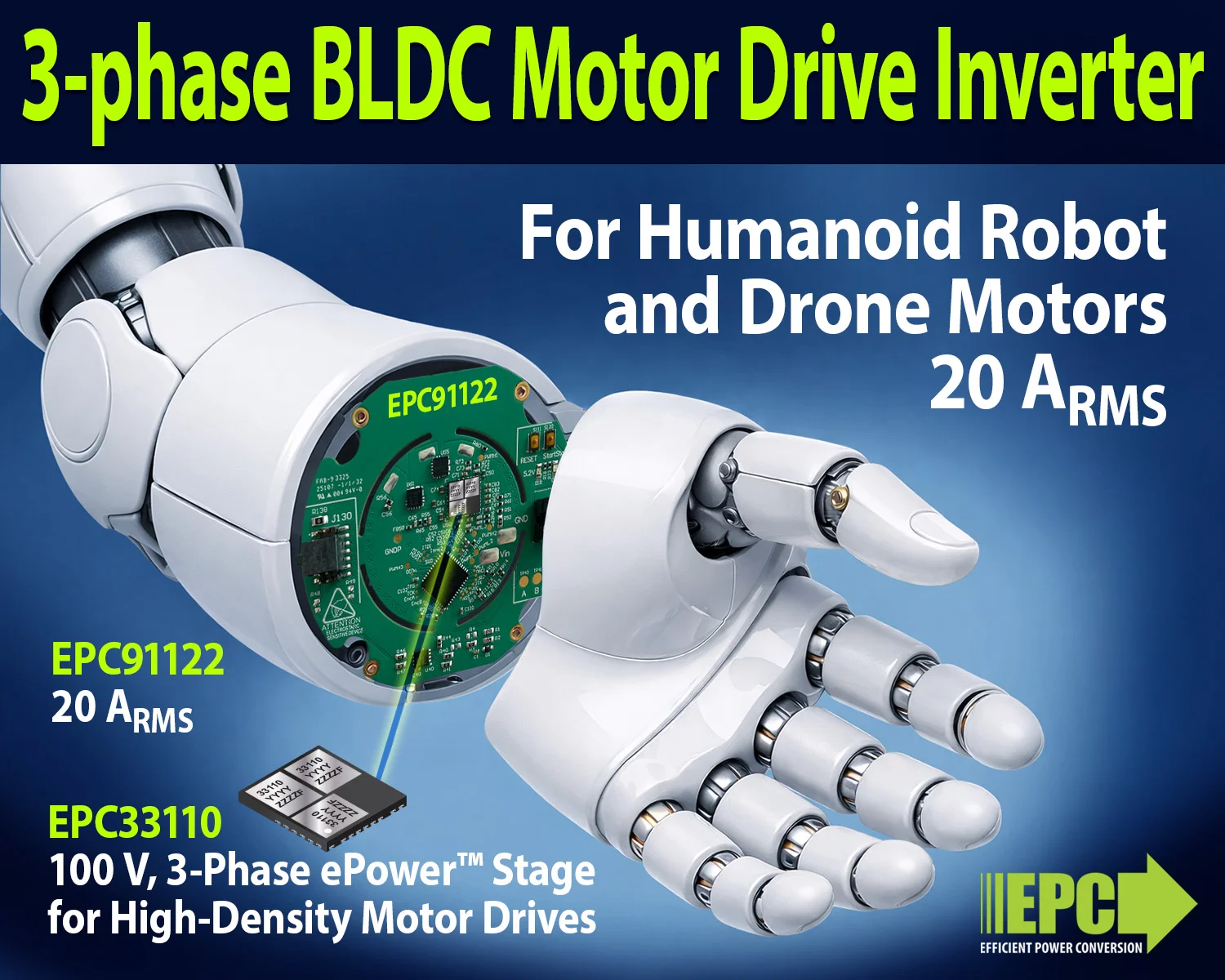
Humanoid Joint Drives Pushed Into The Motor Housing
The heart of the EPC91122 is not just its GaN devices but the way everything is forced into a circular footprint. The active area of the inverter sits inside a thirty two millimeter inner diameter, while a wider ring around it supports mounting and lab connections. That geometry is intentionally sized to slip inside a motor housing so the electrical and mechanical centers line up. Once the inverter is sitting in the same physical space as the windings, the loop inductance between switches and phases drops and the current responds more honestly to command changes. The board still carries the usual test points and connectors, but its shape pushes designers toward an actuator that behaves like a single integrated unit rather than a motor with a distant drive.
GaN Power Stage At The Core Of The Inverter Board
The EPC33110 ePower Stage sits at the center of the design and provides the three phase bridge in a single module. It runs in the one hundred volt class and co packs three monolithic GaN half bridges with their own gate drive, bootstrap, and level shifting paths. The on resistance sits in the low tens of milliohms per leg, which keeps conduction and switching losses in a range where high frequency operation becomes practical in a compact circular layout. The module can switch up to around one hundred fifty kilohertz, so the magnetic and capacitive components around it can shrink without forcing a compromise on response. With twenty amps rms and close to thirty amps peak phase current capability, the board maps cleanly onto humanoid joints, compact servos, and similar actuators that run from battery supplies in the typical robotics voltage range.
Control And Sensing Integrated On The Same Circular PCB
What makes the EPC91122 more than a power stage demo is how much of the control path is pulled onto the board. A microcontroller dedicated to motor control, an encoder interface with a thousand plus pulses per revolution and index, and both voltage and current sensing are all kept inside the same circular outline. The current sense is scaled so that phase currents map cleanly into the controller without wasting resolution, and the DC bus sensing follows the same pattern. Housekeeping supplies generate the usual five volt and three point three volt rails locally, so no external bias circuitry is needed just to get the inverter running. Communication through a robust differential link keeps the board talkative during lab work but also mirrors what a real joint would need when connected back to a central controller in a full robot. The firmware arrives configured to run pulse width modulation up around one hundred kilohertz with short dead times, which shows how the GaN stage behaves when pushed into the region where switching speed actually matters.
Reference Design That Nudges Robotics Architecture Forward
Most evaluation boards are built to sit on a bench with plenty of space around them. The EPC91122 is shaped for the inside of a joint, and that quietly encourages a different way of thinking about actuator design. When the inverter, control logic, sensing, and mechanics share the same volume, the usual arguments about cable harnesses and parasitics start to fade. Robots, drones, and other eMobility platforms all stand to benefit, but humanoid systems are likely to feel the change first because their gait and balance depend strongly on how quickly and predictably each joint responds. This board does not solve every integration problem, but it offers a concrete template for how a dense, GaN based drive can live inside the actuator instead of bolted somewhere nearby.
Learn more and read the original announcement at www.epc-co.com
You may also like